Los portales de viajes online se han convertido en referentes para organizar viajes, ya que albergan gran cantidad de opiniones y comentarios de los visitantes acerca del destino elegido, y más concretamente, sobre los lugares visitados, los alojamientos utilizados, los restaurantes donde han comido, o las atracciones disfrutadas, entre otros.
El análisis de estos datos permitiría elaborar mapas de flujos muy precisos acerca de la movilidad de los turistas en ciertas zonas y en determinados momentos y, por lo tanto, realizar estudios de segmentación sobre sus preferencias.
En la actualidad, los métodos de segmentación tradicionalmente más utilizados son la elaboración de encuestas directas a los turistas, o la realización de estudios analíticos, y en tiempo real, sobre la movilidad de turistas utilizando la conectividad Wi-Fi. Sin embargo, ninguno de estos métodos de segmentación está adaptado para analizar los datos masivos suministrados por los turistas directamente en las plataformas de viaje.
En el método propuesto, mediante los algoritmos desarrollados por este equipo de investigación, se crean redes entre los elementos del sistema lo que permitiría realizar estudios de segmentación para identificar, por ejemplo, la heterogeneidad entre los turistas, e individualizar de este modo la oferta de servicios según el perfil de cada usuario.
Uno de los grandes problemas en los sistemas y modelos de predicción meteorológica, es la dificultad para determinar, en un tiempo razonablemente corto, los fenómenos meteorológicos que se pueden producir en un punto en concreto, especialmente cuando se trata de tiempo adverso.
En la actualidad, los sistemas de predicción están basados en diferentes fuentes de datos: radar, rayos, satélite, estaciones meteorológicas, y los modelos numéricos permiten estimar la ocurrencia de estos fenómenos en entornos “macro”, es decir, en un área geográfica concreta y en un periodo de tiempo relativamente corto. Asimismo, según la AEMET, existen soluciones que, basadas en modelos deterministas y en diferentes herramientas y aplicaciones, permiten obtener predicciones experimentales cuantitativas de las áreas (alrededor de un punto) para plazos inferiores a 6 horas (http://www.aemet.es/es/idi/prediccion/prediccion_inmediata).
ENERGY PREDICTOR es un sistema basado en un software que permite la realización de un modelado para la predicción meteorológica a nivel microscópico y de corto plazo, es decir, con solo unas pocas horas de antelación, llegando a un mínimo de cinco minutos de antelación, caracterizando la variabilidad climática y reduciendo al mínimo el error existente entre la predicción y la medida real.
El sistema también permite hacer predicciones sobre la cantidad de energía que se va a generar en cualquier panel solar o aerogenerador durante la próxima hora, lo que permitiría mejorar la eficiencia y fiabilidad en los procesos de generación energética.
Las palas de natación son un accesorio, generalmente plástico, que se ajusta a las manos del nadador mediante distintos métodos de sujeción, según modelo, quedando instalada en la palma de la mano. Los argumentos que sustentan la justificación de su utilidad se basan principalmente en el efecto sobre el perfeccionamiento de la ejecución técnica y el efecto de mejora en la fuerza aplicada en cada brazada.
En el mercado se suelen encontrar en diferentes formas, materiales y métodos de uso. Las características quedan definidas por cuestiones de diseño de los fabricantes, así como tipología de usuarios objetivo y grupos musculares que se pretendan trabajar. Las palas más grandes se suelen utilizar para el fortalecimiento de la parte superior del tronco, debido a que el esfuerzo requerido para lograr el desplazamiento es mucho mayor comparado al nado sin palas. Por otra parte, las palas pequeñas, las cuales provocan una menor resistencia a la brazada que las palas grandes, suelen emplearse para mejorar la técnica del nadador.
Debido al incremento de la resistencia de la brazada que las palas provocan, estas deben de ser seleccionadas, ajustadas y utilizadas correctamente, para no llegar a producir lesiones en los usuarios. Es apreciable en el entorno general de los nadadores como este proceso suele resultar complejo, y conllevar bastante tiempo y cambios de tipología de palas para satisfacer los objetivos de ellos.
La solución propuesta en esta invención consiste en una pala ergonómica, de geometría y comportamiento modificable, gracias a una placa que se deforma bajo las presiones hidrodinámicas, permitiendo una redistribución de estas a lo largo del ciclo de la brazada. Esta pala de talla única se presenta para poder ser utilizado por nadadores de diferentes niveles, edades, y morfología, gracias a su geometría ajustable e influencia en el comportamiento de uso de la pala. La placa deformable, o flexora, ha sido optimizada junto a la placa estructural para ser ajustada mediante un sistema efectivo y sencillo de utilizar de tornillos a lo largo de numerosos orificios, que permiten desplazamientos en vertical, horizontal, y rotaciones en sentido antihorario, visto desde la parte superior de la pala.
Los rangos de desplazamientos han sido considerados para ajustarse al mayor número posible de usuarios, y a un rango de biomecánica correcta general.
La pala, consta de una estructura principal a la que se le acopla una placa flectora mediante un sistema de dos a tres tornillos, fácilmente removibles e intercambiables de posición por el usuario. La placa flectora se deforma dependiendo de la fase de la brazada, lo que permite redistribuir y homogeneizas las cargas sobre los miembros superior del nadador. Este fenómeno se logra al aumentar el esfuerzo sobre el nadador durante fase inicial o de ataque de la parte subacuática, y una menor exigencia durante la fase final o de salida, donde se genera un impulso en la dirección de nado, por recuperación elástica de la placa flexora.
Adicionalmente, la placa flexora permite al nadador agudizar su percepción sobre la ubicación de la mano por su geometría y carácter personalizable, penalizando por ello los cambios bruscos de dirección de sus manos, y consecuentemente extrapolable a los miembros superiores. Estas correcciones permiten mejorar la técnica de nado del nadador, tanto en Adicionalmente, la placa flexora permite al nadador agudizar su percepción sobre la ubicación de la mano por su geometría y carácter personalizable, penalizando por ello los cambios bruscos de dirección de sus manos, y consecuentemente extrapolable a los miembros superiores. Estas correcciones permiten mejorar la técnica de nado del nadador, tanto en niveles recreativos como profesionales, así como en otros campos de uso como son las terapias de recuperación y fortalecimiento.
En la actualidad el diseño de esta novedosa pala de natación está presentado como modelo de utilidad en la Oficina Española de Patentes y Marcas.
Se ha fabricado un prototipo funcional por métodos de fabricación aditiva, comúnmente conocido como impresión 3D. El proceso de fabricación de la pala ha sido considerado para ser lo más efectivo posible en términos de costos, siendo actualmente optimizado para ejecutarse con polímeros reciclados, concretamente polipropileno.
Uno de los problemas a los que se enfrenta la humanidad en la actualidad es la excesiva cantidad de basura en el mar que constituye una amenaza para los ecosistemas marinos. A pesar de que existen diversos tipos de basura, tales como vidrios, aceites, metales, etc., los plásticos representan más del 80% de la basura marina. Éstas, una vez entran en el medio marino, se mueven y acumulan a lo largo de todo el planeta, de manera que existen informes de presencia de islas de basura flotante en todos los mares y océanos.
La persistencia de los plásticos en la naturaleza puede conducir a riesgos serios para el ser humano y la fauna salvaje, produciendo cambios en los ecosistemas, exposición a sustancias químicas, que bien están presentes en la composición de estos plásticos o bien han sido adsorbidos en ellos en el medio marino, y a efectos letales y subletales debido al atrapamiento con elementos de plástico por parte de la fauna marina o a su ingestión.
En este sentido, los microplásticos son especialmente peligrosos, pues son partículas con un tamaño tan diminuto que se vuelven indetectables.
A esta problemática, se suma el hecho de que los métodos de muestreo a gran escala para el monitoreo de microplásticos en aguas de mar abierto siguen siendo un desafío en la oceanografía. Se requiere una gran cantidad de muestras para comprender la distribución, abundancia y destino de estas partículas en el medio marino y, a pesar de que los océanos son donde se acumula la mayor parte del plástico, relativamente pocos estudios se enfocan específicamente en este medio debido a la inherente dificultad del muestreo.
Los métodos utilizados actualmente para el muestreo están basados, principalmente, en un sistema de colecta mediante el remolque de una red de plancton. Sin embargo, presenta algunas desventajas, como son la inexactitud a la hora de calcular el volumen muestreado debido a la turbulencia del agua, o su ineficiencia para recuperar microplásticos inferiores a 300 micras debido a la limitación del tamaño de la malla.
Para resolver esta problemática, el MuMi (protegido por el Modelo de Utilidad 202100078) es un dispositivo que permite el muestreo acuático de microplásticos de hasta 50 micras de tamaño (el diámetro de un cabello), solventando con ello alguno de los inconvenientes de los sistemas actuales. Además, este dispositivo facilita la investigación sobre la abundancia y distribución de microplásticos e incrementa las posibilidades de muestreo al solo requerir para su funcionamiento la conexión a una toma de mechero (12V). MuMi es un modelo ligero y de tamaño reducido (menos de 50 cm), lo que permite su remolque por embarcaciones de pequeña escala, como las de recreo, pesca recreativa, o turismo náutico. Está fabricado en ácido poliláctico (PLA), un termoplástico biodegradable, mediante impresión 3D y cuenta con varios filtros intercambiables de distintos tamaños. El propio dispositivo cuenta con un caudalímetro, que mediante el cable de conexión y una pantalla a bordo, permite visualizar el volumen de agua filtrado directamente desde la embarcación y en todo momento. La instalación no requiere ninguna especificación técnica compleja, pudiendo ser utilizado por un amplio rango de plataformas de muestreo. Gracias a su diseño hidrodinámico y su bajo peso, se mantiene a flote durante la navegación y, de esta manera, va filtrando las partículas que se encuentra en la superficie. En la imagen se expone cómo sería el despliegue del mismo desde la embarcación para el muestreo, mediante un remolque sencillo.
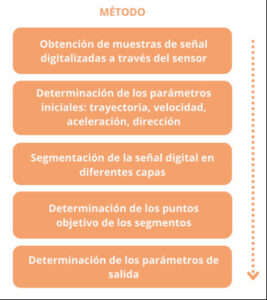
El movimiento humano es el resultado del conjunto de una serie compleja de órdenes enviadas por el cerebro y ejecutadas por el sistema muscular. El resultado de los movimientos humanos puede ser recogido por diferentes tipos de sensores disponibles (acelerómetros, pantallas táctiles, tabletas digitalizadoras, cámaras y micrófonos, entre otros).
Cuando un individuo sufre una enfermedad degenerativa o trastornos en su desarrollo, la respuesta muscular y/o la sincronización de las órdenes emitidas por el cerebro pueden resultar afectadas, reflejándose sus efectos en el movimiento.
Con el fin de poder evaluar las órdenes y la respuesta del sistema muscular, se propone un nuevo método de procesado de la información, desarrollado en colaboración con la Universidad Politécnica de Montreal, que descompone el movimiento en categorías más pequeñas, permitiendo un mejor análisis. Así, se presenta un algoritmo que hace posible obtener parámetros en tiempo real y que, además, facilita la parametrización de los diferentes tipos de movimientos.
Este método, además, puede ser usado en sensores como KinectTM y Leap MotionTM, como en dispositivos inteligentes como smartwatch, smartband, smartphone o tablet de manera que, utilizando los sensores disponibles en estos dispositivos, se recogen las señales del movimiento que, aplicando la metodología desarrollada, permiten obtener la información.
Posteriormente, los parámetros obtenidos a través de este método permitirán a los especialistas (médicos, fisioterapeutas, logopedas…) evaluar el grado de diferentes enfermedades, cuantificar su grado de mejoría respecto a un determinado tratamiento o rehabilitación, y monitorizar a los pacientes a distancia.
Además, dado que este algoritmo puede ser implementado en tiempo real en los dispositivos inteligentes, se podrá procesar la información sin necesidad de ser enviada a otro dispositivo para dicho procesamiento, ahorrando batería y evitando transmitir datos biométricos.
La firma manuscrita es el sistema más utilizado en el mundo como medio de autentificación, teniendo aceptación legal. De ahí, la importancia de la fiabilidad en los métodos y sistemas de verificación automático de la firma.
En la actualidad, existen dos métodos para verificación de firma: El método on-line, cuando el proceso se realiza mientras el usuario está firmando, lo cual permite disponer de datos extras, como la presión, la velocidad, el punto de inicio y fin de los trazos, etc., y el método off-line, en el cual la verificación se realiza posteriormente, es decir, una vez que el usuario ha terminado de firmar, por lo que el proceso de verificación es más complicado.
En ambos casos los sistemas requieren almacenar firmas indubitadas, es decir, firmas que han sido realizadas por el firmante original.
La principal diferencia de la solución que aquí se propone, respecto de otras que ya existen en el mercado, es que nuestro sistema no requiere almacenar firmas indubitadas. En cambio, dado un conjunto de documentos firmados, una vez extraídas las firmas, este sistema es capaz de verificar si las firmas manuscritas pertenecen al mismo autor o no.
Durante siglos, la firma manuscrita ha sido aceptada en todo el mundo con el propósito de reconocer la autoría de las personas firmantes. Algunas de sus aplicaciones más utilizadas han sido: la validación legal de documentos formales como contratos, testamentos, declaraciones de impuestos corporativos; o en las transferencias financieras, entre otras. Esto ha hecho que la firma se utilice como un rasgo biométrico en el contexto de sistemas y aplicaciones.
Desde el punto de vista de la tecnología, existen dos tipos de firmas:
Firmas off-line o estáticas: Son las más frecuentes y tradicionales. Son firmas que quedan deposita das en un papel tras la firma del individuo con un instrumento de escritura, normalmente un bolígrafo. La información de esta firma suele encontrarse en una imagen escaneada.
Firmas on-line o dinámicas: Su principal característica es que contienen el orden temporal y dinámico en el que el firmante ejecutó la firma (presión del lápiz, velocidad de escritura, aceleración y trazado). Para registrar este tipo de firmas se usan dispositivos electrónicos, como por ejemplo las tabletas, sobre las que se escribe con un lápiz digital, o los dispositivos táctiles, como los smartphones, sobre los que se escribe directamente con el dedo.
Los avances tecnológicos han permitido el surgimiento de robots capaces de actuar con las mismas características que la inteligencia humana, mediante el aprendizaje de patrones matemáticos a partir de datos conocidos, con el fin de generalizar y predecir nuevas situaciones. Con este fin se utiliza el llamado aprendizaje automático, que se basa en la introducción del conocimiento en forma de ejemplos continuados. Cuanto más rica sea la muestra de datos, más efectivo será entrenar a las máquinas.
Sin embargo, la obtención de datos reales (firmas, en este caso), es un proceso costoso que además encuentra algunas barreras u obstáculos legales, como podría ser la normativa en materia de protección de datos de carácter personal.
Una forma de resolver este dilema es mediante la producción de los llamados datos sintéticos, que son datos artificiales fabricados por ordenadores con alta similitud a las firmas reales. Estos datos son anónimos y se crean a partir de una serie de parámetros matemáticos que les permiten asemejarse a datos reales.
Los modelos generativos tienen la capacidad de aprender de datos reales y crear datos muy similares a éstos, distinguiéndose dos posibilidades:
Generación de duplicados de firmas: Duplicar una firma significa generar artificialmente nuevas firmas a partir de una (o varias) firmas reales genuinas. Entre sus ventajas están: el entrenamiento de los sistemas de verificación automática, el aumento del número de firmas en una base de datos, el ajuste en el rendimiento de los verificadores con un menor número de firmas reales de referencia o la mejora de los rendimientos iniciales de un verificador.
Generación completa de firmas sintéticas: En la generación de la firma totalmente sintética, los algoritmos empiezan a trabajar sin conocer ninguna firma real. En esta modalidad, los algoritmos definen una nueva identidad ficticia, diseñan la firma y generan tantas repeticiones de dicha firma ficticia como se soliciten Estos generadores crean tanto firmas estáticas como firmas dinámicas.
La solución propuesta es un motor integrado por algoritmos capaces de generar firmas sintéticas, tanto duplicadas (a partir de una base de datos de donantes, que cedieron sus firmas manuscritas con fines de docencia e investigación) como generadas completamente de manera sintética, es decir, sin partir de firmas reales (eliminando así cualquier restricción ligada a la ley de protección de datos).
De hecho, el motor es capaz de generar bases de datos ad-hoc para el desarrollo y entrenamiento de sistemas con propósitos comerciales. En este contexto, las firmas sintéticas tienen muchas utilidades, y entre ellas: minimizar el tiempo de aprendizaje automático, o el coste y el riesgo de las operaciones.
La monitorización de entornos susceptibles de actos violentos, o de seguridad, es una actividad común para las fuerzas de seguridad, especialmente en entornos con espacios públicos. La vigilancia a través de vídeo implica el acto de observar una escena y detectar comportamientos anómalos. Entre estos tipos de comportamientos, destacan los relacionados con la violencia.
En este sentido, los métodos tradicionales de vigilancia todavía requieren de un componente humano. Esto podría no ser efectivo por dos motivos: los posibles elevados costes del mantenimiento de personal para la videovigilancia y el riesgo del error humano debido a despistes propiciados por la fatiga.
En los últimos años, la Inteligencia Artificial ha desarrollado diversas técnicas orientadas a la detección de comportamiento anómalo a través de cámaras de videovigilancia por circuito cerrado. No obstante, aunque consideramos necesaria la intervención de un componente humano para confirmar las posibles alarmas generadas por el software, la labor de estas personas se vería mucho más descargada.
De esta manera, la solución que aquí se propone consiste en una técnica desarrollada a través de un software para la detección automática de escenas violentas. Dicho software, que se implementa en una cámara de videovigilancia convencional, hace uso de técnicas avanzadas de “deep learning” que se fusionan con algoritmos de seguimiento de personas en tiempo real.
Con esta solución se pretende, pues, dar respuesta a dos necesidades de la sociedad actual: la detección en tiempo real de escenas violentas en las calles, lo que permitiría dar una respuesta apropiada y rápida, y, gestionar y delimitar contenido violento o inapropiado para su difusión, especialmente a menores de edad, a través de los controles parentales.
En los últimos años los drones han alcanzado una gran popularidad, en parte debido a la aparición de controladoras de vuelo de código abierto, tales como ARDUPILOT o Pixhawk, que han permitido a los desarrolladores innovar a un coste más asequible. A esto se ha sumado la aparición cada vez más creciente de soluciones comerciales desarrolladas por marcas ya muy conocidas, como DJI, y el amplio abanico de aplicaciones que se ven beneficiadas de las posibilidades que ofrece el uso de drones.
Entre algunas de las aplicaciones que más interés despiertan se encuentra el uso de drones en monitorización de eventos (recitales, desfiles, eventos deportivos y hasta protestas), ya que permiten volar más cerca de las personas, con mayor maniobrabilidad y menor riesgo que otras alternativas, como helicópteros tripulados o brazos de grúas, adquiriendo datos que pueden ser usados con fines de seguridad, periodismo o cineasta, entre otros.
Así mismo, también ha alcanzado gran popularidad las aplicaciones que se benefician del uso de drones para automatizar o aligerar tareas repetitivas o altamente costosas en medios humanos. Entre otras destacan el uso de drones para la inspección de campos de cultivo o amplios espacios naturales con el objetivo de evaluar el estado de la vegetación, identificar objetivos o buscar personas, entre otros. En general, se espera que en España el sector de los drones experimente un gran avance en las próximas tres décadas tal y como se muestra en la Figura 1.
En todas las aplicaciones previamente mencionadas el dron es la parte central y fundamental del sistema. Sin embargo, siempre se encuentra acompañado de subsistemas adicionales propios de la aplicación específica que se le desea dar. Por ejemplo, en aplicaciones relacionadas con filmografía el dron típicamente se equipa con una cámara de video acoplada a un estabilizador, y tanto el dron como la cámara son controlados por un operador a través de un canal de raido. En aplicaciones orientadas a la video vigilancia o búsqueda de personas el sistema incorpora cámaras de primera persona y subsistemas que permiten la transmisión de las imágenes al operador en tiempo real para su visualización. Así mismo, en aplicaciones orientadas a la monitorización de cultivos o espacios naturales el dron se equipa con distintos tipos de sensores que adquieren información de interés, y su vuelo normalmente se automatiza para que lleve a cabo misiones autónomas siguiendo patrones que aseguren escanear toda la superficie deseada.
En cada una de las situaciones previamente mencionadas las características que debe cumplir la aeronave varían enormemente (peso máximo a transportar, tamaño, control de vuelo, comunicaciones, tiempo de vuelo mínimo requerido, costes y precio límite, etc.). En esta línea, el Instituto Universitario de Microelectrónica Aplicada (IUMA) ha adquirido la capacidad de desarrollar drones con características y especificaciones flexibles capaces de abarcar un amplio rango de aplicaciones a un coste reducido. Dichos drones integran una controladora de vuelo Pixhawk de código abierto y el firmware PX4, e incorporan un mini PC a bordo con un Linux empotrado capaz de comunicarse con la controladora de vuelo y de controlar prácticamente cualquier tipo de sensor que se desee añadir al sistema (cámaras fotográficas o de video, sensores multiespectrales o hiperespectrales, cámaras térmicas, lidar, etc.). La inclusión de dicho PC a bordo de la plataforma también garantiza gran flexibilidad en las comunicaciones con la estación de tierra y permite llevar a cabo distintos tipos de misiones autónomas de vuelo. Además, las características del PC a bordo pueden variar enormemente, desde PC con un precio, tamaño y coste muy reducidos a sistemas con mayor capacidad de cómputo que integran incluso GPUs de bajo consumo. Esto permite ejecutar a bordo tareas computacionalmente más costosas si fuese necesario, e incluso, optar por procesar en tiempo real los datos adquiridos y tomar decisiones de forma automática en base a los resultados obtenidos, ampliando aún más el rango de aplicación de las plataformas desarrolladas.
En comparación con las soluciones comerciales existentes, la solución que se presenta ofrece una mayor modularidad y flexibilidad, permitiendo su adaptación a cualquier tipo de aplicación y sus peculiaridades. Esto representa un atractivo especial para todos aquellos que deseen involucrarse en el desarrollo de nuevas aplicaciones basadas en drones
El cada vez más conocido proceso de fabricación aditiva FDM (Fused deposition modeling), es el principio por el que trabaja la mayoría de las impresoras 3D domésticas o de oficina, y se basa en la deposición de capas de material fundido apiladas sobre una cama de trabajo. Estas impresoras constan normalmente de un cabezal calefactado, el cual empuja un filamento de plástico a través de la boquilla a la temperatura adecuada, conformando la pieza que se ha diseñado. Cuando se fabrican piezas con esta tecnología se debe predefinir con qué materiales se va a hacer, y qué parte se hace de cada material, lo que permite fabricar piezas multimateriales, pero con fronteras intermedias entre un material y otro.
Por otro lado, otro concepto clave es el de FGM (Functionally Graded Materials). Cuando se habla de este tipo de materiales se refiere a la fabricación de piezas de distintos materiales, pero donde la transición entre un material y otro se hace de forma gradual. Esto implica que, al no existir fronteras entre ambos, el cambio de características físicas y de resistencias también se hace de forma gradual, abriendo un sinfín de nuevas opciones. Esto resulta interesante, por ejemplo, para el ámbito aeroespacial, donde se necesita cierta resistencia térmica para la reentrada de elementos en La Tierra, pero también una determinada resistencia mecánica. En este caso, para evitar la fractura en la unión entre diferentes materiales, se comenzaron a fabricar piezas que cambiaban de un material a otro de forma gradual, amortiguando las dilataciones producidas al reentrar en La Tierra.
De esta manera, el mezclado homogéneo de materiales se ha convertido en algo presente en multitud de campos, desde la construcción a la química básica; pero cuanto más se reduce la escala de estas partículas, más fuerzas entran en acción, dificultando la tarea. Un ejemplo de ello es el proceso de mezcla de polímeros con aditivos, en el cual, en muchas ocasiones, parámetros tan simples como la humedad, la temperatura o el propio tamaño de las partículas hace imposible esta labor, o lo hace con un sobrecoste significativo.
Para la impresión en 3D, por tanto, se necesita elegir un material determinado, con características físico-químicas concretas y, aunque se recurra a los materiales FGM que, como se ha dicho, se depositan gradualmente permitiendo la transición de un material a otro, sigue existiendo el problema del control del material depositado en cada momento, según la coordenada exacta de la pieza en cada momento.
Con el fin de garantizar el control de esa deposición del material adecuado, el Grupo de Investigación en Fabricación Integrada y Avanzada de la Universidad de Las Palmas de Gran Canaria, ha concebido la presente invención, cuya finalidad es eliminar factores que lastran el proceso de mezcla homogénea, permitiendo mezclar materiales micrométricos con precisión y de forma controlada.
Este dispositivo consta de tres partes diferenciadas, la primera de ella es el cabezal de extrusión, el cual va integrado con la segunda, el ciclón mezclador, y, por último, el sistema regulador de mezcla. Además, dado que el sistema está compuesto por módulos, se puede cambiar el tercer módulo (extrusor) por otros elementos que den un abanico más amplio de usos a la invención, siendo adaptable a otros ámbitos incluso fuera de la impresión 3D.
El funcionamiento de la invención es el siguiente: se toma como ejemplo dos materiales cualesquiera en forma de polvo (podría ser también un material y un aditivo), que se coloca en los depósitos de dos sistemas de mezcla. Estos sistemas constan de una aspiración de aire limpio con una llave de regulación que llega a un tubo Venturi. Regulando el caudal de esta entrada, se regula también la cantidad de polvo absorbido y empujado al ciclón mezclador.
Al regular la cantidad de cada material que entra al ciclón mezclador, se consigue que el polvo introducido se mezcle instantáneamente en las proporciones adecuadas y, automáticamente, sea utilizado por el cabezal extrusor para su deposición en la impresora.
De esta forma, se puede imprimir estructuras porosas con control espacial del material depositado, lo que hace posible la fabricación de materiales graduales con tecnologías de impresión 3D basadas en extrusión de material para la regeneración celular en el campo de la medicina regenerativa, circuitos impresos recubiertos con un proceso directo, elementos resistentes a la abrasión solo en donde hay contacto, y, así, un largo etcétera.